
Name: Mechanical-Design
Owner: Aerial Robotics Kharagpur
Description: null
Created: 2015-10-08 15:51:14.0
Updated: 2015-10-08 15:51:14.0
Pushed: 2015-10-08 17:47:37.0
Homepage: null
Size: 6428
Language: null
GitHub Committers
| User | Most Recent Commit | # Commits |
|---|
Other Committers
| User | Most Recent Commit | # Commits |
|---|
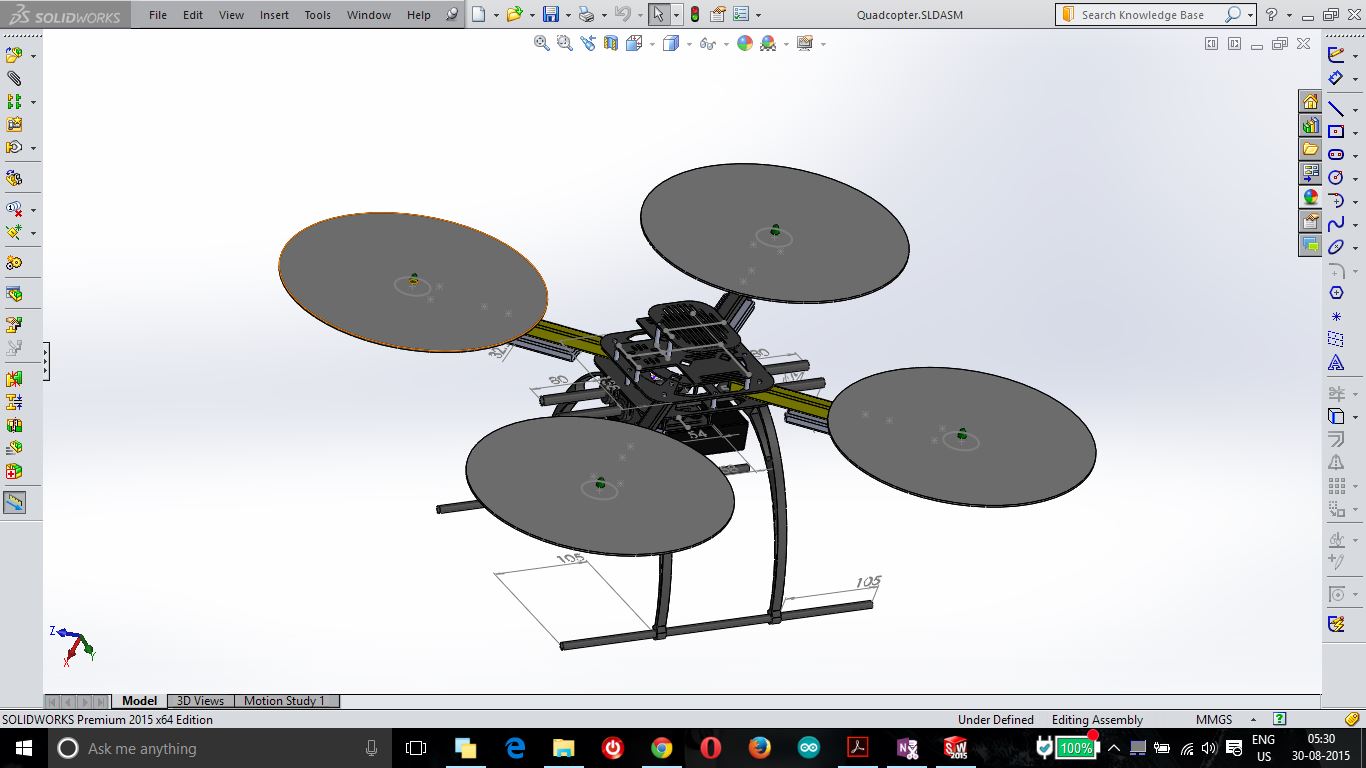
Assembly contains all the part which are there in the original bot currently. Each and every single part has been created individually precisely. Camera needs to be added to the bot as soon as we decide the position and the camera we are going to use.